
Download CBSE Class 12 Syllabus for Mathematics 2023 2024. Refer to the latest syllabus provided below and free download latest curriculum of Class 12 for Mathematics issued by CBSE and NCERT, free download in pdf, get topic wise weightage, suggested readings and books based on latest syllabus and guidelines. The Mathematics Class 12 Syllabus curriculum has been developed and issued by CBSE and NCERT for Mathematics in Class 12. All students studying in Class 12 are suggested to go through latest syllabus to ensure that their preparation is as per the latest syllabus issued by CBSE NCERT KVS. Class 12 Mathematics students should do preparation for Mathematics exam strictly based on the latest curriculum and concentrate more on the topics with higher weightage to help them score higher marks in Class 12 Mathematics class tests and exams
Class 12 Mathematics Syllabus
It is important for students to study as per the latest Class 12 Mathematics curriculum and marks breakup as per important topics. This will help to prepare properly for the upcoming examination. You can click on the following links to download the latest and past year syllabus provided by us below.
Year Wise Mathematics Syllabus Class 12
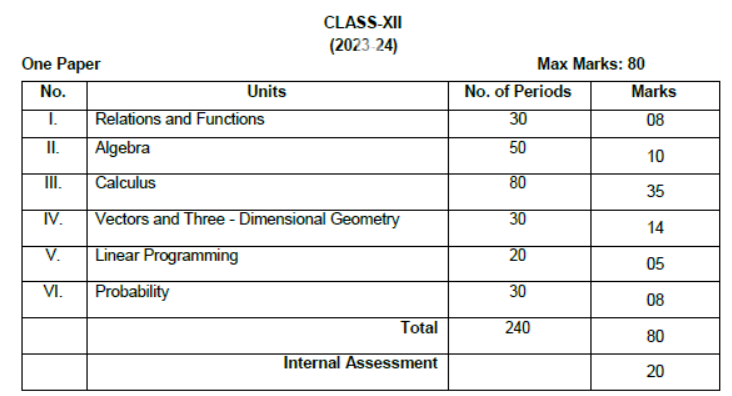
Unit-I: Relations and Functions
1. Relations and Functions 15 Periods
Types of relations: reflexive, symmetric, transitive and equivalence relations. One to one and onto functions.
2. Inverse Trigonometric Functions 15 Periods
Definition, range, domain, principal value branch. Graphs of inverse trigonometric functions.
Unit-II: Algebra
1. Matrices 25 Periods
Concept, notation, order, equality, types of matrices, zero and identity matrix, transpose of a matrix, symmetric and skew symmetric matrices. Operations on matrices: Addition and multiplication and multiplication with a scalar. Simple properties of addition, multiplication and scalar multiplication. Non- commutativity of multiplication of matrices and existence of non-zero matrices whose product is the zero matrix (restrict to square matrices of order 2). Invertible matrices and proof of the uniqueness of inverse, if it exists; (Here all matrices will have real entries).
2. Determinants 25 Periods
Determinant of a square matrix (up to 3 x 3 matrices), minors, co-factors and applications of determinants in finding the area of a triangle. Adjoint and inverse of a square matrix. Consistency, inconsistency and number of solutions of system of linear equations by examples, solving system of linear equations in two or three variables (having unique solution) using inverse of a matrix.
Unit-III: Calculus
1. Continuity and Differentiability 20 Periods
Continuity and differentiability, chain rule, derivative of inverse trigonometric functions, 𝑙𝑖𝑘𝑒sin−1𝑥,cos−1𝑥and tan−1𝑥, derivative of implicit functions. Concept of exponential and logarithmic functions.
Derivatives of logarithmic and exponential functions. Logarithmic differentiation, derivative of functions expressed in parametric forms. Second order derivatives.
2. Applications of Derivatives 10 Periods
Applications of derivatives: rate of change of quantities, increasing/decreasing functions, maxima and minima (first derivative test motivated geometrically and second derivative test given as a provable tool). Simple problems (that illustrate basic principles and understanding of the subject as well as real-life situations).
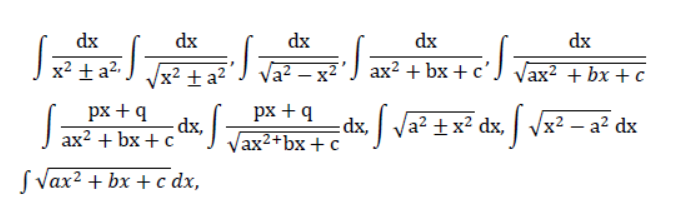
3. Integrals 20 Periods
Integration as inverse process of differentiation. Integration of a variety of functions by substitution, by partial fractions and by parts, Evaluation of simple integrals of the following types and problems based on them.
Fundamental Theorem of Calculus (without proof). Basic properties of definite integrals and evaluation of definite integrals.
4. Applications of the Integrals 15 Periods
Applications in finding the area under simple curves, especially lines, circles/ parabolas/ellipses (in standard form only)
5. Differential Equations 15 Periods
Definition, order and degree, general and particular solutions of a differential equation. Solution of differential equations by method of separation of variables, solutions of homogeneous differential equations of first order and first degree. Solutions of linear differential equation of the type:
dy/dx+py=q,where p and q are functions of x or constants.
d𝑥/d𝑦+px=q,where p and q are functions of y or constants.
Unit-IV: Vectors and Three-Dimensional Geometry
1. Vectors 15 Periods
Vectors and scalars, magnitude and direction of a vector. Direction cosines and direction ratios of a vector. Types of vectors (equal, unit, zero, parallel and collinear vectors), position vector of a point, negative of a vector, components of a vector, addition of vectors, multiplication of a vector by a scalar, position vector of a point dividing a line segment in a given ratio. Definition, Geometrical Interpretation, properties and application of scalar (dot) product of vectors, vector (cross) product of vectors.
2. Three - dimensional Geometry 15 Periods
Direction cosines and direction ratios of a line joining two points. Cartesian equation and vector equation of a line, skew lines, shortest distance between two lines. Angle between two lines.
Unit-V: Linear Programming
1. Linear Programming 20 Periods
Introduction, related terminology such as constraints, objective function, optimization, graphical method of solution for problems in two variables, feasible and infeasible regions (bounded or unbounded), feasible and infeasible solutions, optimal feasible solutions (up to three non-trivial constraints).
Unit-VI: Probability
1. Probability 30 Periods
Conditional probability, multiplication theorem on probability, independent events, total probability, Bayes’ theorem, Random variable and its probability distribution, mean of random variable.
1. No chapter wise weightage. Care to be taken to cover all the chapters
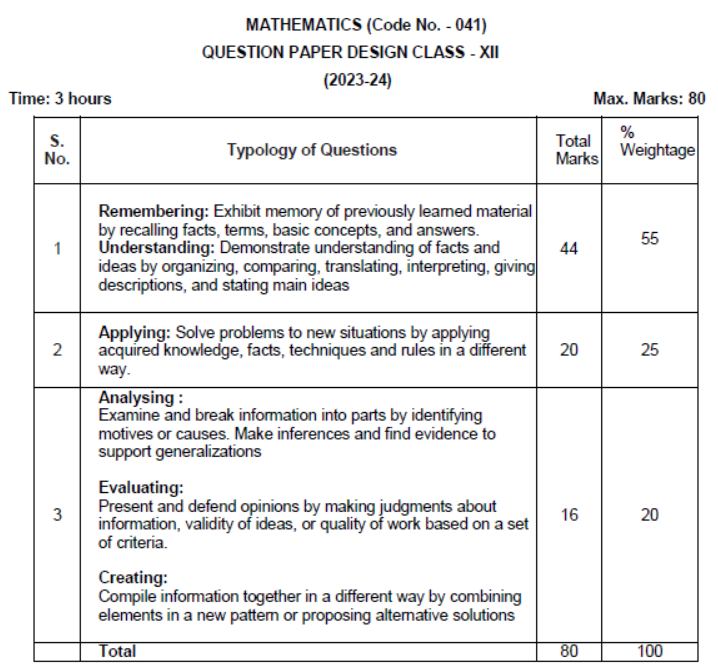
2. Suitable internal variations may be made for generating various templates keeping the overall weightage to different form of questions and typology of questions same.
Choice(s):
There will be no overall choice in the question paper.
However, 33% internal choices will be given in all the sections
INTERNAL ASSESSMENT 20 MARKS
Periodic Tests ( Best 2 out of 3 tests conducted) 10 Marks
Mathematics Activities 10 Marks
More Study Material
You can download the CBSE 2023 Syllabus for Class 12 Mathematics for latest session from StudiesToday.com
Yes, you can click on the links above and download Syllabus in PDF for Class 12 for Mathematics
Yes, the syllabus issued for Class 12 Mathematics have been made available here for latest 2023 academic session
You can easily access the links above and download the Class 12 Syllabus Mathematics
There is no charge for the Syllabus for Class 12 CBSE Mathematics you can download everything free
Planning your studies as per syllabus given on studiestoday for Class 12 subject Mathematics can help you to score better marks in exams
Yes, studiestoday.com provides all latest CBSE Class 12 Mathematics Syllabus with suggested books for current academic session
Yes, studiestoday provides curriculum in Pdf for Class 12 Mathematics in mobile-friendly format and can be accessed on smartphones and tablets.
Yes, syllabus for Class 12 Mathematics is available in multiple languages, including English, Hindi